Pytorch中的Conv1d和Conv3d
Conv1d
torch.nn.Conv1d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True, padding_mode='zeros')
和Conv2d处理[N,C,H,W]相比,只是处理处理的数据为[N,C,L],其余相同。
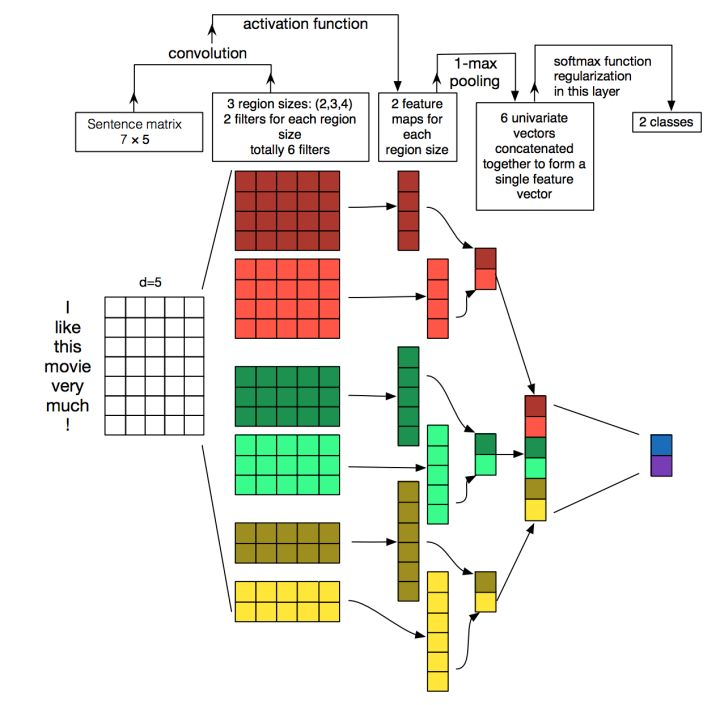
>>> x = torch.ones([1,5,7])
>>> f = torch.nn.Conv1d(in_channels=5,out_channels=2,kernel_size=4)
>>> y = f(x)
>>> print(y.shape)
torch.Size([1, 2, 4])下图的红色部分的计算过程,实际上就是这段代码。
Conv3d
torch.nn.Conv3d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True, padding_mode='zeros')
处理数据为[N,C,D,H,W],针对视频数据。对于公式计算,完全可以将D维度等同于H和W处理。
>>> x = torch.ones([1,3,10,255,255])
>>> f = torch.nn.Conv3d(in_channels=3,out_channels=2,kernel_size=(4,3,3))
>>> y = f(x)
>>> print(y.shape)
torch.Size([1, 2, 7, 253, 253])上述代码可以看做有10帧图像,每帧图像3通道,宽高为[255,255]。3d卷积核size在(D,H,W)三个维度上分别为(4,3,3)。输出为2通道的253*253的图像,共8帧。
对于上述代码情况,我将其过程图画在下面。(花了半个晚上才画好)
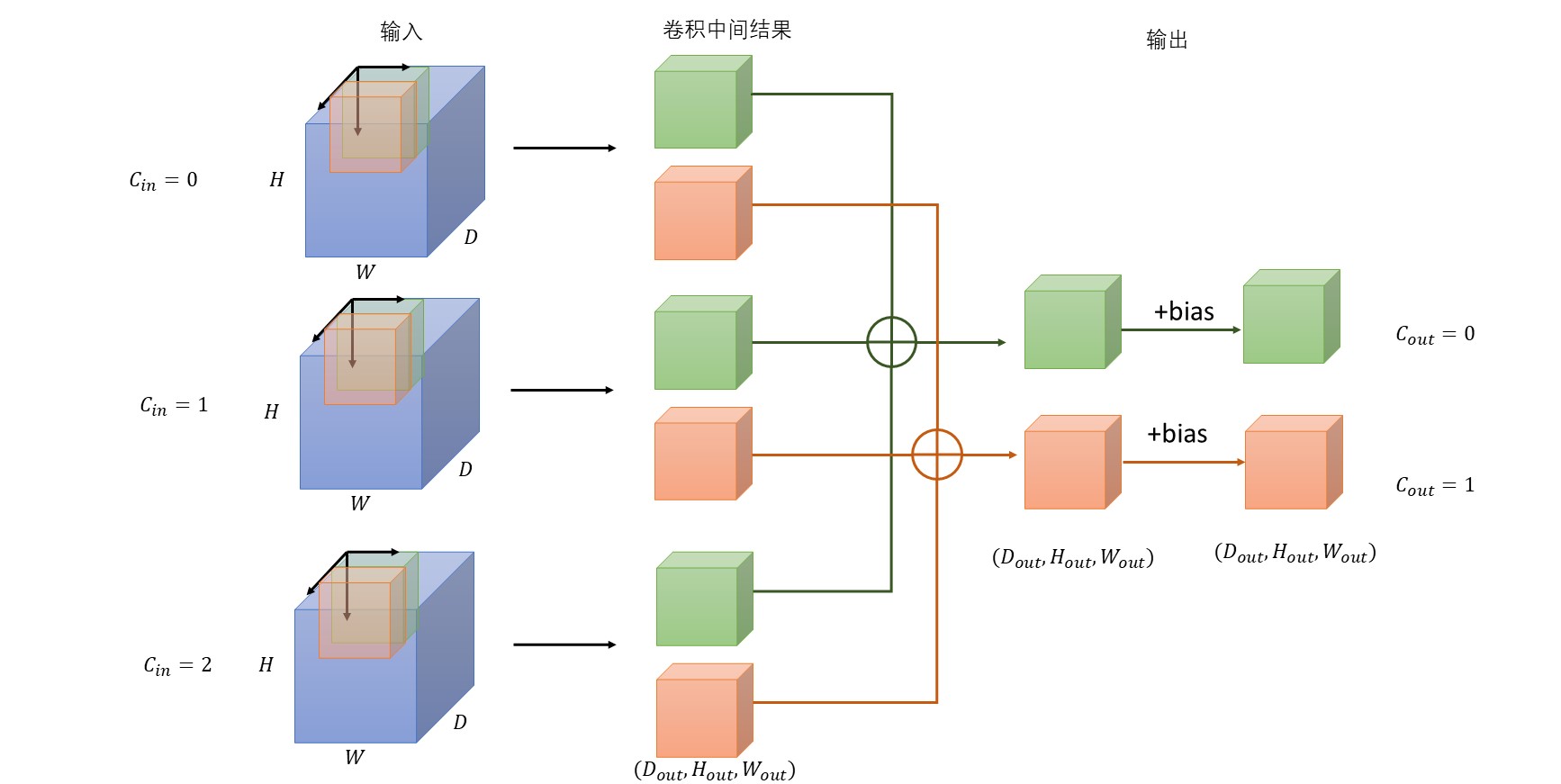
注意:
-
每个卷积核为,所有卷积核(Weight)的维度为。
-
输出channel为2,因此有2种颜色的卷积核;输入channel为3,因为每个颜色的卷积核有3个(蓝块内)。
-
卷积核在输入数据(蓝块)内有三个移动方向,分别为D方向、H方向和W方向。三个方向优先级等同,就像在二维卷积中无所谓先遍历H方向,还是先遍历W方向。
-
参考二维卷积,应该是卷积核和对应位置的输入数据先相乘再求和得到一个值,然后在三个方向上移动,最终生成中间的“卷积中间结果”。将相同颜色的“卷积中间结果”相加得到最终的输出,即得到对应的输出通道值。
-
bias的维度是,一个输出维度对应一个偏置量。